Зачем ездить или ходить, если можно прыгать?
Японские двуногие роботы должны появиться на Луне в 2020 году. Подготовка идет полным ходом. На данном этапе одним из ключевых вопросов, который предстоит решить разработчикам, это вопрос о способе передвижения роботов по поверхности Луны. Опыт американцев, которые «похоронили» на поверхности Марса двух колесных роботов, подталкивает японских исследователей космоса искать альтернативные решения. Тем более, что японские роботы уже точно будут гуманоидами – с руками и ногами. Но будут они ходить или передвигаться на мобильных колесных платформах?

На минувшей неделе на международной конференции IEEE по вопросам роботостроения в китайском городе Тяньцзине прозвучала идея о том, что роботы могут прыгать на поверхности Луны. Концепцию представил японский исследователь Ацуо Тэкэниши (Atsuo Takanishi) из токийского университета Waseda. Группа ученых под руководством Ацуо Тэкэниши развивает соответствующее программное обеспечение на базе робота WABIAN-2R. Исследовательский проект по созданию этого робота гуманоида, способного передвигаться на своих двоих так же легко как человек, был запущен еще в 2003 году. Кроме японцев в нем принимают участие исследователи из Италии, Франции и Португалии.
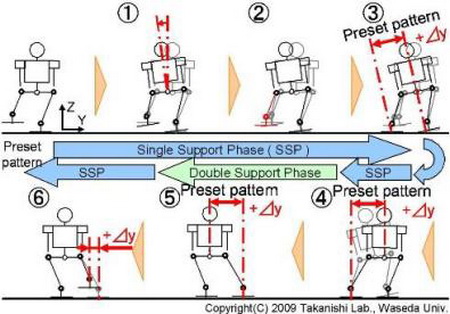
В рамках будущего освоения Луны «команда» Тэкэниши «заставила» робота WABIAN-2R «попрыгать» — и с ноги на ногу, и отталкиваясь сразу двумя ногами. Исследователи вычислили наиболее оптимальную высоту прыжка робота, при которой он мог бы устойчиво «прилуняться» — 0,8 метра. С учетом особенностей лунной поверхности ученые считают, что это лучший способ передвижения гуманоида. Особенно с учетом того, что сила тяжести на Луне в шесть раз меньше, чем на Земле. Робот будет вполне в состоянии легко подняться на ноги, даже если упадет после прыжка. Максимальная высота, на которую способен прыгнуть WABIAN-2R с программным обеспечением от Тэкэниши -1.5 метра. О длине прыжков пока не сообщается.
Стоит отметить, что концепция Ацуо Тэкэниши о способе передвижения роботов по поверхности Луны не единственная. Этой же темой в университете Роберта Гордона в Абердине (Великобритания) занимается, например, Кристофер Маклеод (Christopher MacLeod). Он считает, что, отказавшись от колесных мобильных платформ, роботы гуманоиды чувствовали бы себя гораздо увереннее, если бы перемещались на четвереньках – как животные.
Источник roboting.ru



{kind=link}
Последние комментарии