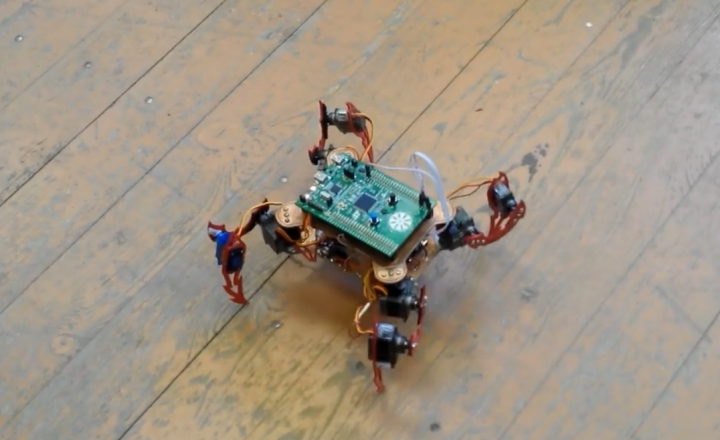
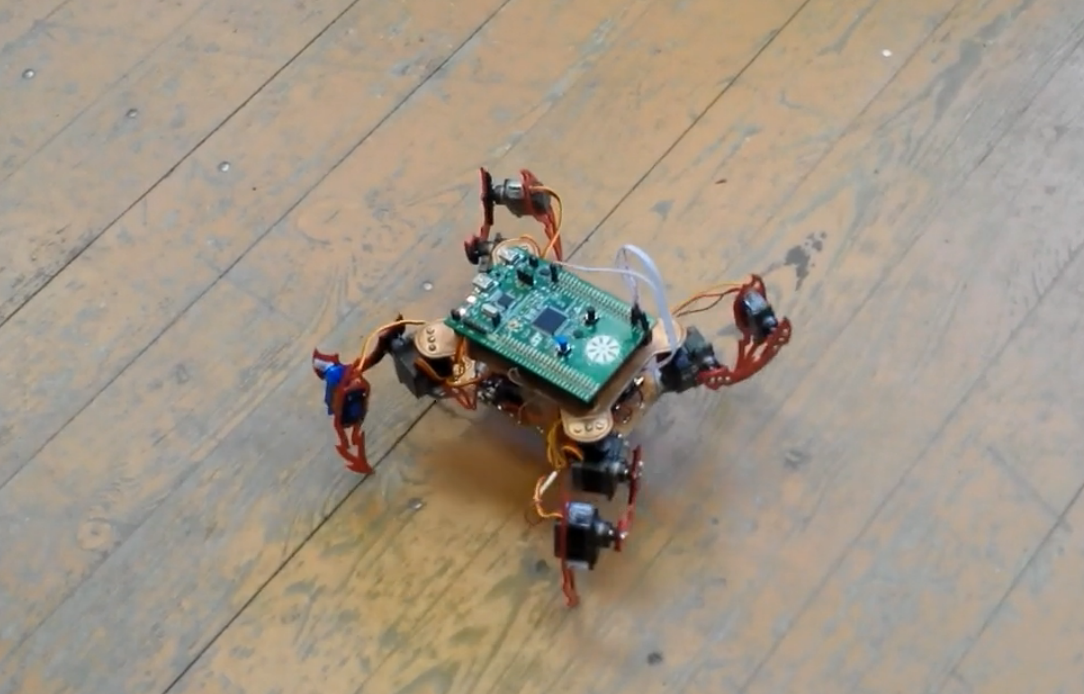
В последнее время в сети появилось много статей по созданию шагающих роботов на основе китайских сервомашинок. Все они написаны технически грамотно и со знанием дела, вот только есть небольшая проблема: в большинстве случаев описанные в них поделки в итоге не работают. Посему предлагаем вашему вниманию нашу разработку, доведенную до логического конца.
Автор: Nolk (Skype: nolk777)
Подробно о проекте: http://www.zobot.ru/kvadropod-na-mg90/
Цели, планы
Главная цель в общем-то достигнута: робот ходит, чуть ли не танцует. Пока, наверно возьмём таймаут до осени, чтоб мозг отдохнул. Там как раз мини-камеры придут, будем ставить. Сейчас по-быстрому наверно перенесём управляющую прогу на андроид, чтоб управлять не с ноута, а с телефона с тачскрином. Мысли по дальнейшему применению (если руки дойдут) такие: 1) Поставить на него сонар на сервомашинку и сканировать вокруг, отправлять данные на комп, тот будет строить карту местности (как в играх) и соответственно направлять робота дальше; 2) Т.к. аккумулятор небольшой — есть смысл научить его самозаряжаться, т.е. приделать к плинтусу два контакта, и чтоб он сам к ним коннектился. Находить будет или по ультразвуку или по инфрасвету или 3) Можно научить ходить по нарисованной на полу белой линии, для чего нужно анализировать только одну строку из кадра с бортовой камеры, смотрящей вперед и вниз; 4) Если завести ноги под себя, как кошка/собака то можно проходить более узкие коридоры нежели при раскинутых лапах. По сути это уже другой метод перемещения, другая математика. 
{kind=link}
Последние комментарии