Macra – робот для изучения тактильных ощущений
Роботы для домашней работы, которые должны будут окружать нас с вами в очень недалеком будущем, по мнению большинства исследователей должны иметь достаточно чувствительную поверхность. Прежде всего это связано с безопасностью, иначе робот не понимает с каким усилием например можно пожать вам руку, и вообще рука ли это или металлическая арматура. Поверхность робота должна уметь фиксировать тактильные ощущения — реагировать на прикосновение, давление, температуру.
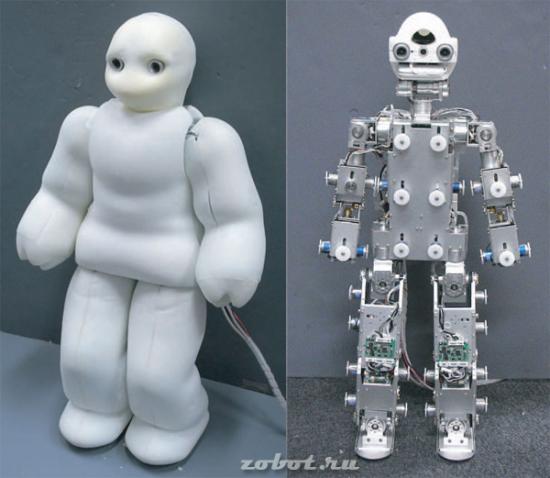
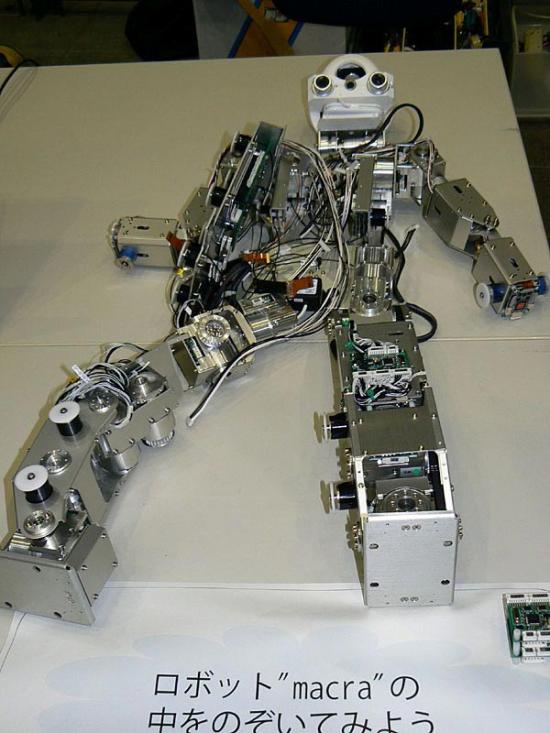
Этой темой занимаются ученые проекта JSK (Jouhou System Kougaku Lab, a department of Tokyo University). Практические результаты их работы должен демонстрировать робот Macra.

Логичным решением проблемы создания чувствительной кожи было бы расположить максимальное количество датчиков по всей поверхности робота, но это дорого для массового производства. Macra имеет достаточно небольшое число датчиков, равномерно распределенных «по сетке» по всему телу и ученные пытаются разработать математические алгоритмы оценки состояния всей поверхности базируясь на данных получаемых с них.

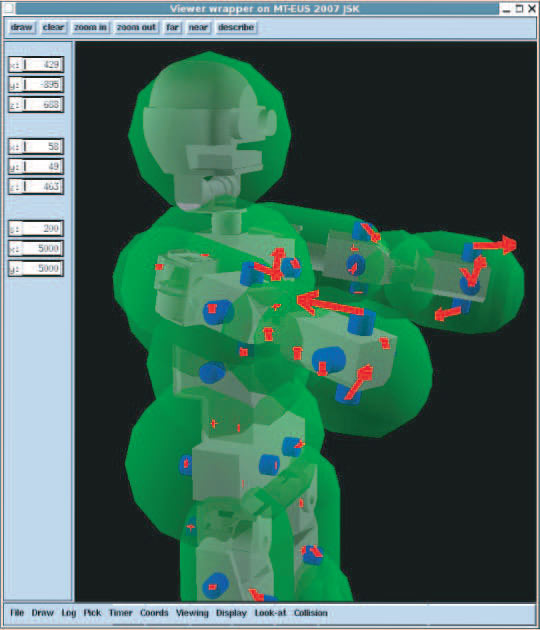
В идеале, датчики должны работать, как рецепторы на коже человека создавая поверхность без нечувствительных пятен. Кроме того, пытаются найти оптимальное соотношение количества датчиков, необходимых для полноценной реакции робота.

{kind=link}
Последние комментарии