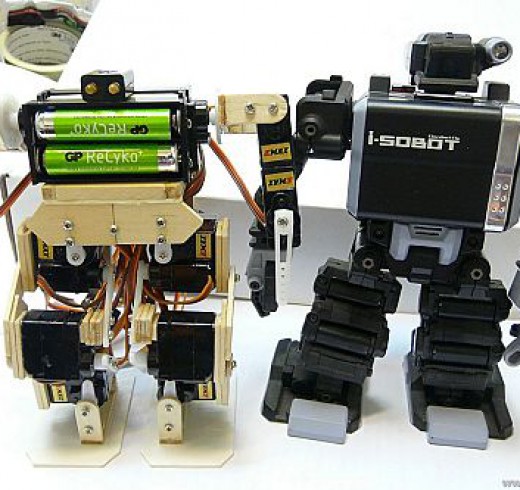
Деревянный клон Клон i-Sobot January 21, 2010 by namitka · Published January 21, 2010 · Last modified June 29, 2014
А эта девушка уже умеет готовить кофе January 19, 2010 by koka · Published January 19, 2010 · Last modified June 29, 2014
Новый робот-насекомое “Hector” April 15, 2011 by namitka · Published April 15, 2011 · Last modified July 7, 2014



{kind=link}
Последние комментарии